Non-Standard Approach¶
There are implemented two different approaches for the polynomial parts
of the splines in PyTrajectory. They differ in the choice of the nodes.
Given an interval ![[x_k, x_{k+1}],\ k \in [0, \ldots, N-1]](../_images/math/b8aa0c98f411d01e771db63c7a717245f7e42d2a.png) the standard
way in spline interpolation is to define the corresponding polynomial
part using the left endpoint by
the standard
way in spline interpolation is to define the corresponding polynomial
part using the left endpoint by

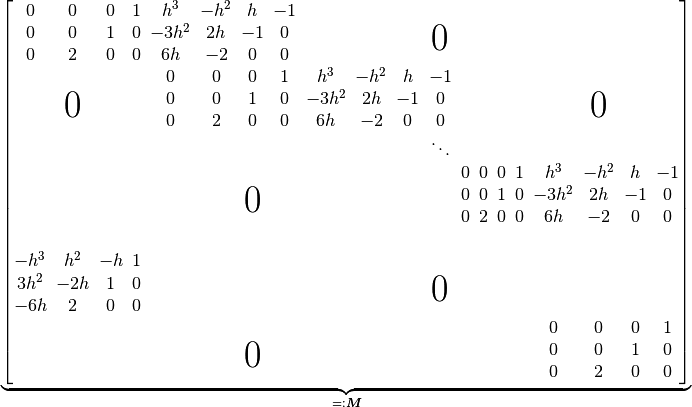
However, in the thesis of O. Schnabel from which PyTrajectory emerged a different approach is used. He defined the polynomial parts using the right endpoint, i.e.

This results in a different matrix to ensure the smoothness and boundary conditions of the splines:
The reason for the two different approaches being implemented is that after implementing and switching to the standard approach some of the examples no longer converged to a solution. The examples that are affected by that are: